![]()
‚O‚VپAIK(‰ٌ“]پAˆع“®)
‘و‚Vڈح‚إ‚حƒ}ƒEƒXƒhƒ‰ƒbƒO‚إƒ{پ[ƒ“‚جژpگ¨‚ً•زڈW‚إ‚«‚é‚و‚¤‚ة‚µ‚ـ‚·پB
‚ـ‚¸چہ•WŒn‚ً“±“ü‚µ‚ـ‚µ‚½پB
ƒ{پ[ƒ“‚جژ²‚ھZژ²‚ئˆê’v‚·‚é‚و‚¤‚بچہ•Wژ²‚ً“±“ü‚µپA‚»‚ê‚ھژ‹ٹo‚إ•ھ‚©‚é‚و‚¤‚ةƒ}ƒjƒsƒ…ƒŒپ[ƒ^‚ً•\ژ¦‚µ‚ـ‚·پB
گش‚ھXژ²پA—خ‚ھYژ²پAگآ‚ھZژ²‚ًژ¦‚µ‚ـ‚·پB
ƒ}ƒjƒsƒ…ƒŒپ[ƒ^‚ً‰Eƒhƒ‰ƒbƒO‚·‚邱‚ئ‚ة‚و‚èIK‚جŒvژZ‚ًچs‚¢پAƒ{پ[ƒ“‚جژpگ¨‚ً•زڈW‚µ‚ـ‚·پB
ƒپƒCƒ“ƒEƒCƒ“ƒhƒE‚جپu‰ٌ“]IKپvپuˆع“®IKپv‚جƒ‰ƒWƒIƒ{ƒ^ƒ“‚إ‰ٌ“]‚©ˆع“®‚©‚ً‘I‚ر‚ـ‚·پB
‰ٌ“]‚جڈêچ‡‚حƒ‰ƒWƒIƒ{ƒ^ƒ“‚ج‰؛‚جگ”ژڑ‚ج•\ژ¦‚ج‚ ‚éƒRƒ“ƒ{ƒ{ƒbƒNƒX‚إŒvژZٹK‘wگ”‚ًژw’肵‚ـ‚·پB
ŒvژZٹK‘wگ”‚حچإ‘ه’l‚إ‚ ‚èپAچإ‘ه’l‚ة’B‚·‚é‘O‚ة•‚“®ƒ{پ[ƒ“‚âˆê”شگe‚ة’B‚µ‚½ڈêچ‡‚ح‚»‚±‚إŒvژZ‚حژ~‚ـ‚è‚ـ‚·پB
ŒvژZٹK‘wگ”‚O‚O‚ً‘I‚ٌ‚¾ڈêچ‡‚حپA•‚“®ƒ{پ[ƒ“‚ـ‚½‚حˆê”شگe‚ة‚½‚ا‚è’…‚‚ـ‚إژ©“®‚إ‚³‚©‚ج‚ع‚ء‚ؤŒvژZ‚µ‚ـ‚·پB
ƒ}ƒjƒsƒ…ƒŒپ[ƒ^‚ج’†‰›‚ج‰©گF‚ًƒhƒ‰ƒbƒO‚·‚é‚ئ
ژ©—R‚بژ²‚ة‚و‚é‰ٌ“]‚ً‚µ‚ـ‚·پB
گشپA—خپAگآ‚ج•”•ھ‚ًƒhƒ‰ƒbƒO‚·‚é‚ئ‚»‚ꂼ‚ê‘خ‰‚·‚éX,Y,Zژ²‚ً‰ٌ“]ژ²‚ة‚µ‚ؤ‰ٌ“]‚µ‚ـ‚·پB
‰ٌ“]‚جIK‚حCCD•ûژ®‚إ‚·پB
ƒ\پ[ƒX‚ح‰؛‚جƒyپ[ƒW‚©‚çƒ_ƒEƒ“ƒچپ[ƒh‚µ‚ؤ‚‚¾‚³‚¢پB
OpenRDBƒ_ƒEƒ“ƒچپ[ƒhƒyپ[ƒW
‚O‚Vپ|‚O‚PپAƒ{پ[ƒ“چہ•WŒn‚ج“±“ü
چ،‚ـ‚إ‚جچہ•WŒn‚حƒOƒچپ[ƒoƒ‹چہ•WŒn‚إ‚µ‚½پB
‚µ‚©‚µژہچغ‚جژpگ¨‚ج•زڈWژ‚ة‚حƒ{پ[ƒ“‚جژ²‚جچہ•WŒn‚إ•زڈW‚µ‚½•û‚ھŒّ—¦‚ھ‚¢‚¢‚إ‚·پB
‚»‚±‚إ‚ـ‚¸ƒ{پ[ƒ“چہ•WŒn‚ً“±“ü‚µ‚ـ‚·پB
ƒ{پ[ƒ“‚جژ²‚ھZژ²‚ئˆê’v‚µپAŒم‚ج‚Qژ²‚ئگ‚’¼‚ة‚ب‚é‚و‚¤‚بچہ•WŒn‚ًچl‚¦‚ـ‚·پB
ƒfپ[ƒ^‚ئ‚µ‚ؤ‚ح‚±‚ج‚و‚¤‚ب•دٹ·‚ً‚·‚邽‚ك‚جƒNƒHپ[ƒ^ƒjƒIƒ“CBone::m_axisq‚ً•غژ‚µ‚ـ‚·پB
CBone::m_axisq‚جŒvژZ•û–@‚حˆب‰؛‚ج‚و‚¤‚ة‚ب‚è‚ـ‚·پB
|
Zژ²‚ھƒ{پ[ƒ“‚جژ²‚ئˆê’v‚·‚é‚و‚¤‚ة‚µپAYژ²‚حmikotoŒ`ژ®‚جژOٹpƒ{پ[ƒ“‚جˆê”ش’Z‚¢•س‚ج’¸“_‚جˆت’u‚ًژg‚ء‚ؤŒvژZ‚µ‚ـ‚·پB
‚»‚µ‚ؤX,Y,Zژ²‚ھ‚·‚ׂؤگ‚’¼‚جٹضŒW‚ة‚ب‚é‚و‚¤‚ةCross‚إ’²گ®‚µ‚ـ‚·پB
•دٹ·چs—ٌ‚حگV‚µ‚¢Xژ²‚ھ_11, _12, _13گ¬•ھ‚ةپAگV‚µ‚¢Yژ²‚ھ_21, _22, _23گ¬•ھ‚ةپA
گV‚µ‚¢Zژ²‚ھ_31, _32, _33گ¬•ھ‚ئ‚ب‚é‚و‚¤‚ب‰ٌ“]چs—ٌ‚إ‚·پB
‚±‚جچs—ٌ‚ًƒNƒHپ[ƒ^ƒjƒIƒ“‚ة•دٹ·‚µ‚ؤCBone::m_axisq‚ة•غ‘¶‚µ‚ـ‚·پB
چہ•WŒn‚ًگف’肵‚½‚çƒ{پ[ƒ“ژpگ¨‚جƒIƒCƒ‰پ[ٹp‚جŒvژZ‚à•د‚¦‚ب‚¢‚ئ‚¢‚¯‚ـ‚¹‚ٌپB
ڈCگ³Œم‚جCQuaternion::Q2Eul‚حˆب‰؛‚ج‚و‚¤‚ة‚ب‚è‚ـ‚·پB
|
EQ = invaxisQ * *this * axisQ;
‚ئ‚¢‚¤‚ئ‚±‚ë‚ھƒ~ƒ\‚إ‚·پB
ƒ{پ[ƒ“چہ•WŒn‚إ‚جƒNƒHپ[ƒ^ƒjƒIƒ“‚ة’¼‚µ‚ؤ‚¢‚ـ‚·پB
axisQ‚حCBone::m_axisq‚إinvaxisQ‚ح‚»‚ج‹tƒNƒHپ[ƒ^ƒjƒIƒ“‚إ‚·پB
ƒIƒCƒ‰پ[ٹp‚©‚çƒNƒHپ[ƒ^ƒjƒIƒ“‚ة’¼‚·‚ئ‚«‚ة‚à•دچX‚ھ‚ ‚è‚ـ‚·پB
|
q = axisQ * qy * qx * qz * invaxisQ;
‚ئ‚¢‚¤‚ئ‚±‚ë‚ھڈCگ³•”•ھ‚إ‚·پB
OpenRDB‚إ‚جƒNƒHپ[ƒ^ƒjƒIƒ“‚جٹ|‚¯ژZ‚ج‹Lڈq‚ة‚ح’چˆس‚ھ•K—v‚إ‚·پB
‰ٌ“]•دٹ·‚جڈ‡”ش‚حٹ|‚¯ژZ‹Lڈq‚ئ‹t‚ة‚ب‚è‚ـ‚·پB
q1 * q2‚ئڈ‘‚‚ئq2‚ج‰ٌ“]‚ج‚ ‚ئ‚ةq1‚ج‰ٌ“]‚ً‚·‚é‚ئ‚¢‚¤ˆس–،‚إ‚·پB
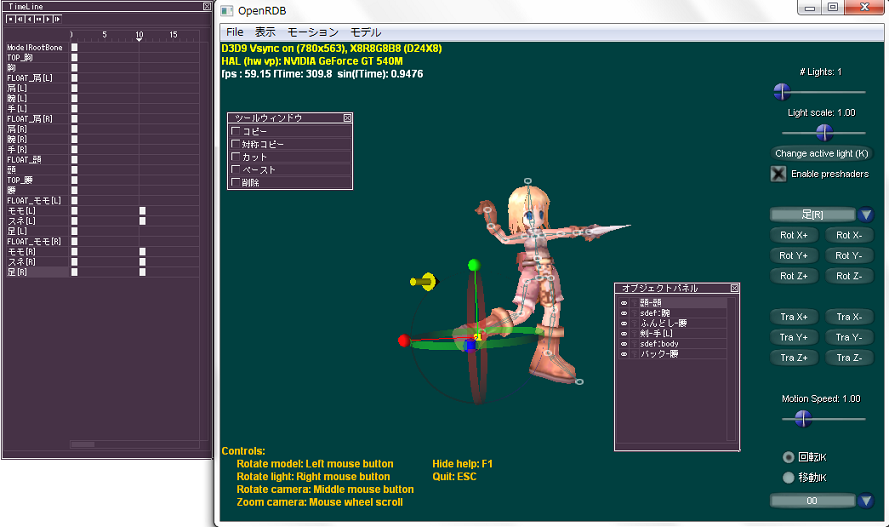
‚O‚Vپ|‚O‚QپAƒ}ƒjƒsƒ…ƒŒپ[ƒ^‚ج•`‰و
ƒ{پ[ƒ“چہ•WŒn‚ةچ‡‚ي‚¹‚ؤچہ•Wژ²‚جŒü‚«‚ًƒ}ƒjƒsƒ…ƒŒپ[ƒ^‚إ‘I‘ًƒ{پ[ƒ“‚جˆت’u‚ة•\ژ¦‚µ‚ـ‚·پB
ƒ{پ[ƒ“‚ج‘I‘ً‚ح‰EƒNƒٹƒbƒN‚إچs‚¢‚ـ‚·پB
چ¶ƒNƒٹƒbƒN‚¶‚ل‚ب‚‚ؤ‰EƒNƒٹƒbƒN‚ب‚ج‚إ’چˆس‚µ‚ؤ‚‚¾‚³‚¢پB
ƒ}ƒjƒsƒ…ƒŒپ[ƒ^‚حRDBMain.cpp‚إچىگ¬•\ژ¦‚µ‚ـ‚·پB
ƒپƒ^ƒZƒRƒCƒA‚جƒtƒ@ƒCƒ‹‚حselect_2.mqo‚إ‚·پBMedia/RDBMedia‚ة“ü‚ء‚ؤ‚¢‚ـ‚·پB
‚±‚ê‚ًCModel‚إ‚ ‚és_select‚ة“ا‚فچ‚ف‚ـ‚·پB
ˆêچH•v‚¢‚é‚ج‚حƒJƒپƒ‰‚ج‹——£‚ب‚ا‚ة‚و‚ء‚ؤƒ}ƒjƒsƒ…ƒŒپ[ƒ^‚ج‘ه‚«‚³‚ھ•د‰»‚µ‚ب‚¢‚و‚¤‚ة‚·‚邱‚ئ‚إ‚·پB
ƒ}ƒjƒsƒ…ƒŒپ[ƒ^‚ج•`‰و•”•ھ‚جƒRپ[ƒh‚ً“\‚è•t‚¯‚ـ‚·پB
|
ƒ}ƒjƒsƒ…ƒŒپ[ƒ^‚جƒڈپ[ƒ‹ƒh•دٹ·چs—ٌ‚ً‹پ‚ك‚é‚ج‚ھڈ‚µ“‚¢‚إ‚·پB
“¯‚¶‘ه‚«‚³‚ة‚·‚邽‚ك‚جŒvژZ‚حselectscale‚ً‹پ‚ك‚é•”•ھ‚إ‚·پB
‚ـ‚¸ƒJƒپƒ‰چہ•WŒn‚إ‚جƒ{پ[ƒ“‚جˆت’u‚ئƒJƒپƒ‰چہ•WŒn‚إ‚»‚±‚©‚ç(1.0, 0.0, 0.0)‚¾‚¯—£‚ꂽ“_‚ً
ƒXƒNƒٹپ[ƒ“چہ•W‚ة•دٹ·‚µ‚ـ‚·پB
‚»‚µ‚ؤƒXƒNƒٹپ[ƒ“چہ•WŒn‚إ‚ج’·‚³‚ھˆê’è‚ة‚ب‚é‚و‚¤‚ةselectscale‚ًŒvژZ‚µ‚ـ‚·پB
‚ب‚؛ƒJƒپƒ‰چہ•WŒn‚إ‚Q“_‚ًŒˆ‚ك‚½‚©‚ئ‚¢‚¤‚ئ
ƒJƒپƒ‰‚جŒü‚«‚ةٹض‚ي‚炸‰و–تڈم‚جچہ•W‚ًŒˆ’è‚إ‚«‚é‚©‚ç‚إ‚·پB
‚O‚Vپ|‚O‚RپAƒ}ƒEƒX‚ئƒIƒuƒWƒFƒNƒg‚ج‚ ‚½‚è”»’è
ƒ}ƒjƒsƒ…ƒŒپ[ƒ^‚ج•\ژ¦‚ھڈo—ˆ‚½‚çپA‚»‚ê‚ًƒ}ƒEƒX‚إƒNƒٹƒbƒN‚µ‚½‚ئ‚«‚ة
ƒ}ƒjƒsƒ…ƒŒپ[ƒ^‚ج‚ا‚ج•”•ھ‚ًƒNƒٹƒbƒN‚µ‚½‚ج‚©‚ً”»’肵‚ب‚¯‚ê‚خ‚ب‚è‚ـ‚¹‚ٌپB
‚»‚ج‚½‚ك‚جڈˆ—‚ًگà–¾‚µ‚ـ‚·پB
ƒ}ƒEƒX‚إƒNƒٹƒbƒN‚µ‚½ڈî•ٌ‚ًRDBMain.cpp‚جs_pickinfo‚ة•غژ‚·‚é‚و‚¤‚ة‚µ‚ـ‚·پB
s_pickinfo‚حCoef.h‚إ’è‹`‚µ‚ؤ‚¢‚éPICKINFOچ\‘¢‘ج‚إ‚·پB
|
PICKINFO.buttonflag‚ة‚حPICK_*‚إ’è‹`‚µ‚½enum‚ج‚ا‚ê‚©‚ھگف’肳‚ê‚ـ‚·پB
PICK_CENTER‚حƒ{پ[ƒ“‚ًƒNƒٹƒbƒN‚µ‚½‚ئ‚«‚ةگف’肳‚ê‚ـ‚·پB
PICK_X,Y,Z‚ح‚»‚ꂼ‚êگشپA—خپAگآ‚ج•”•ھ‚ًƒNƒٹƒbƒN‚µ‚½‚ئ‚«‚ةگف’肳‚ê‚ـ‚·پB
‚ـ‚¸ƒ{پ[ƒ“‚ً‰EƒNƒٹƒbƒN‚µ‚½‚©‚ا‚¤‚©‚ج”»’è•û–@‚ًگà–¾‚µ‚ـ‚·پB
ƒ{پ[ƒ“‚جƒNƒٹƒbƒN”»’è‚حCModel::PickBone‚إچs‚¢‚ـ‚·پB
|
UpdateMatrix‚ًژہچs‚·‚é‚ئCBone::m_childscreen‚ةƒ{پ[ƒ“‚جƒXƒNƒٹپ[ƒ“چہ•W‚ھƒZƒbƒg‚³‚ê‚ـ‚·پB
‚±‚ج’l‚ح‰و–ت’†‰›‚ھ(0, 0)‚إ‰و–ت“à‚ھ-1‚©‚ç1‚جٹش‚ة“ü‚é‚و‚¤‚بگ”’l‚إ‚·پB
ƒ}ƒEƒX‚إƒNƒٹƒbƒN‚µ‚½چہ•W‚ئ”ن‚ׂ邽‚ك‚ةپA‚±‚ج-1‚©‚ç1‚ج’l‚ًƒEƒCƒ“ƒhƒE‚ج‘ه‚«‚³‚ًچl—¶‚µ‚½
ƒEƒCƒ“ƒhƒE‚جچہ•W‚ة•دٹ·‚µ‚ـ‚·پB
‚±‚ê‚ً‚µ‚ؤ‚é‚ج‚ھ
cmpsc.x = ( 1.0f + curbone->m_childscreen.x ) * fw;
cmpsc.y = ( 1.0f - curbone->m_childscreen.y ) * fh;
‚ج•”•ھ‚إ‚·پB
‚»‚µ‚ؤƒ{پ[ƒ“‚جƒEƒCƒ“ƒhƒEچہ•W‚ئƒ}ƒEƒX‚جˆت’u‚ج‹——£‚ھPICKINFO.pickrange‚و‚èڈ¬‚³‚¢ƒ{پ[ƒ“‚ج‚¤‚؟
ˆê”ش‹——£‚ھڈ¬‚³‚¢‚à‚ج‚ً‘I‚ر‚»‚جƒ{پ[ƒ“”شچ†‚ًPICKINFO.pickobjno‚ةƒZƒbƒg‚µ‚ـ‚·پB
ƒ}ƒjƒsƒ…ƒŒپ[ƒ^‚جگشپA—خپAگآ‚ج•”•ھ‚ئƒ}ƒEƒX‚ج”»’è‚ح‚ـ‚½‚؟‚ه‚ء‚ئˆل‚¢‚ـ‚·پB
‚±‚ê‚حCModel::CollisionNoBoneObj_Mouse‚إچs‚¢‚ـ‚·پB
|
چ،“x‚ح‚RD‚جƒچپ[ƒJƒ‹چہ•WŒn‚إ”»’肵‚ـ‚·پB
‚ـ‚¸CalcMouseLocalRay‚إƒ}ƒEƒXچہ•W‚ًژn“_‚ئ•ûŒü‚جRay‚ة•دٹ·‚µ‚ـ‚·پB
‚»‚µ‚ؤ‚»‚جRay‚ئCMQOObject::CollisionLocal_Ray‚إ‚ ‚½‚è”»’è‚ً‚µ‚ـ‚·پB
CollisionLocal_Ray‚حپAƒAƒ“ƒJپ[‚ئRay‚ئ‚ج”»’è•û–@‚ئ“¯‚¶‚إ‚·پB
‚O‚Vپ|‚O‚SپAژ©—Rژ²‚جIK‰ٌ“]
ƒ}ƒjƒsƒ…ƒŒپ[ƒ^‚ج’†‰›‚ج‰©گF‚¢•”•ھ‚ً‰Eƒhƒ‰ƒbƒO‚·‚é‚ئژ©—Rژ²‚إIK‰ٌ“]‚·‚é‚و‚¤‚ة‚µ‚ـ‚·پB
IK‰ٌ“]‚جƒAƒ‹ƒSƒٹƒYƒ€‚ة‚حCCD•ûژ®‚ًچج—p‚µ‚ـ‚·پB
ژèڈ‡‚ئ‚µ‚ؤ‚ح‚ـ‚¸ƒ}ƒEƒX‚جˆت’u‚©‚çƒhƒ‰ƒbƒO‚µ‚½ƒ{پ[ƒ“‚ج–ع•Wˆت’u‚ً‹پ‚ك‚ـ‚·پB
ژں‚ةCCD•ûژ®‚ةڈ]‚ء‚ؤپAƒ{پ[ƒ“‚ج–ع•Wˆت’u‚ة‹ك‚أ‚‚و‚¤‚ةژq‹ں‚©‚çگe‚ة‚©‚¯‚ؤڈ‡”ش‚ة‰ٌ“]‚µ‚ؤ‚¢‚«‚ـ‚·پB
‚±‚جچغ‚ا‚±‚ـ‚إگe‚ً‚³‚©‚ج‚ع‚é‚©‚ًژw’è‚إ‚«‚é‚و‚¤‚ة‚µ‚ؤ‚¢‚ـ‚·پB
ƒپƒCƒ“ƒEƒCƒ“ƒhƒE‚ج‰E‰؛‚جگ”ژڑ‚جڈ‘‚¢‚ؤ‚ ‚éƒRƒ“ƒ{ƒ{ƒbƒNƒX‚إ‚³‚©‚ج‚ع‚éٹK‘wگ”‚ًژw’肵‚ـ‚·پB
‚O‚O‚ح“ء•ت‚إ‚O‚O‚ًژw’肵‚½ڈêچ‡‚حˆê”شگe‚ة’B‚·‚é‚©‚à‚µ‚‚ح•‚“®ƒ{پ[ƒ“‚ة“’B‚·‚é‚ـ‚إ‚³‚©‚ج‚ع‚è‚ـ‚·پB
‚O‚OˆبٹO‚إ‚à“r’†‚إˆê”شگe‚ة’B‚µ‚½‚è•‚“®ƒ{پ[ƒ“‚ھ‚ ‚ء‚½ڈêچ‡‚ح‚»‚±‚إƒXƒgƒbƒv‚µ‚ـ‚·پB
گe‚ً‚³‚©‚ج‚ع‚ء‚ؤ‚ج‰ٌ“]چى‹ئ‚حŒJ‚è•ش‚·‚ظ‚اƒ{پ[ƒ“‚ھ–ع•W’n“_‚ة‹ك‚‚ب‚è‚ـ‚·پB
‚µ‚©‚µ‰ٌگ”‚ھ‘½‚‚ب‚é‚ئ“–‘Rڈd‚‚ب‚é‚ج‚إچ،‰ٌ‚ح‚P‰ٌ‚جIK‚ة‚آ‚«‚R‰ٌŒvژZ‚·‚é‚و‚¤‚ة‚µ‚ؤ‚¢‚ـ‚·پB
‚إ‚ح‚ـ‚¸–ع•Wچہ•W‚جŒvژZƒRپ[ƒh‚©‚猩‚ؤ‚ف‚ـ‚µ‚ه‚¤پB
–ع•Wچہ•W‚حRDBMain.cpp‚جCalcTargetPos‚إŒvژZ‚µ‚ـ‚·پB
|
CalcPickRay‚إƒ}ƒEƒXچہ•W‚ًRay‚ة•دٹ·‚µ‚ـ‚·پB
‚ـ‚¸ƒXƒNƒٹپ[ƒ“چہ•WŒn‚إŒvژZ‚µ‚ـ‚·پB
ƒ}ƒEƒXچہ•W‚ج•د‰»•ھ‚ًƒ{پ[ƒ“‚جƒXƒNƒٹپ[ƒ“چہ•W‚ة‘«‚µ‚ؤRay‚جƒXƒNƒٹپ[ƒ“چہ•W‚جX,Y‚ً‹پ‚ك‚ـ‚·پB
‚±‚ê‚ھD3DXVECTOR3 mousesc‚إ‚·پB
ژں‚ةRay‚جژn“_‚ئڈI“_‚جƒXƒNƒٹپ[ƒ“چہ•Wstartsc‚ئendsc‚ً‹پ‚ك‚ـ‚·پB
X‚ئY‚حmousesc‚ئ“¯‚¶‚إ‚·پB
ƒXƒNƒٹپ[ƒ“چہ•W‚ة‚¨‚¢‚ؤپAŒ©‚¦‚é”حˆح‚جˆê”شڈ¬‚³‚¢Z‚ج’l‚ح‚OپD‚OپAˆê”ش‘ه‚«‚¢Z‚ج’l‚ح‚PپD‚O‚إ‚·پB
‚إ‚·‚ج‚إstartsc‚جZ‚ً‚OپD‚O‚ة‚µپAendsc‚جZ‚ً‚PپD‚O‚ةگف’肵‚ـ‚·پB
‚±‚ê‚إRay‚جƒXƒNƒٹپ[ƒ“چہ•W‚ھ‹پ‚ـ‚è‚ـ‚µ‚½پB
‚ ‚ئ‚حƒڈپ[ƒ‹ƒhچہ•W‚ة‚·‚邽‚ك‚ةƒrƒ…پ[•دٹ·‚ئƒvƒچƒWƒFƒNƒVƒ‡ƒ“•دٹ·‚ج‹t•دٹ·‚ً‚µ‚ـ‚·پB
ƒrƒ…پ[‚ئƒvƒچƒWƒFƒNƒVƒ‡ƒ“‚ج•دٹ·چs—ٌ‚ًmVP‚ة‹پ‚ك
‚±‚ج‹tچs—ٌinvVP‚ً‹پ‚ك‚ـ‚·پB
‚±‚ê‚ًD3DXVec3TransformCoord‚إƒXƒNƒٹپ[ƒ“چہ•W‚ة‚©‚¯‚ؤ‚â‚é‚ئپAƒڈپ[ƒ‹ƒhچہ•W‚ھ‹پ‚ـ‚è‚ـ‚·پB
‚±‚ج‚و‚¤‚ة‚µ‚ؤstart‚ئend‚جƒڈپ[ƒ‹ƒhچہ•W‚ً‹پ‚ك‚ـ‚·پB
CalcTargetPos‚جژc‚è‚ج•”•ھ‚إ‚حپA‚±‚جRay‚ئƒJƒپƒ‰•½–ت‚ئ‚جŒً“_‚ً‹پ‚كپA‚±‚ê‚ً–ع•Wچہ•W‚ئ‚µ‚ـ‚·پB
Ray‚جژ®‚ح
(1-t)OS + t OE
‚إ•\‚¹‚ـ‚·پB
ƒJƒپƒ‰•½–تڈم‚جˆê“_‚ًƒ{پ[ƒ“‚جˆت’uB‚ئ‚µپA•½–ت‚ج–@گü‚ً‚ژ‚ئ‚µپAŒً“_‚ًT(target)‚ئ‚·‚é‚ئ
•½–ت‚جژ®‚ح
BTپE‚ژ = 0
(پE‚ح“àگد)
‚إ•\‚¹‚ـ‚·پB
T‚حRayڈم‚ج“_‚ب‚ج‚إ‚±‚جT‚ةRay‚جژ®‚ً‘م“ü‚µ‚ؤt‚ً‹پ‚ك‚é‚ئ
t = SBپE‚ژ / SEپE‚ژ
‚ئ‚ب‚è‚ـ‚·پB
‚±‚ê‚ًRay‚جژ®‚ة‘م“ü‚µ‚ؤ
‹پ‚ك‚éŒً“_پA‚آ‚ـ‚è–ع•Wچہ•W‚ھ‹پ‚ـ‚è‚ـ‚·پB
–ع•Wچہ•W‚ھ‹پ‚ـ‚ء‚½‚çCModel::IKRotate‚إIK‰ٌ“]ڈˆ—‚ًچs‚¢‚ـ‚·پB
|
ƒXƒ^ƒ“ƒ_پ[ƒh‚بCCD•ûژ®‚جIK‚إ‚·پB
ڈع‚µ‚’m‚肽‚¢•û‚حŒںچُ‚·‚ê‚خ‚¢‚‚ç‚إ‚àگà–¾‚حŒ©‚آ‚©‚é‚ج‚إ‚±‚±‚إ‚حڈب—ھ‚µ‚ـ‚·پB
ƒ|ƒCƒ“ƒg‚¾‚¯Œ¾‚ء‚ؤ‚¨‚‚ئ
ŒvژZ‚حٹeƒ{پ[ƒ“‚جگe‚جƒ{پ[ƒ“‚جچہ•WŒn‚إچs‚¤‚ئ‚¢‚¤‚±‚ئ‚إ‚·پB
‚»‚ج‚½‚ك‚ةŒvژZ‚إژg‚¤ٹeچہ•W‚ةگe‚جƒ{پ[ƒ“‚ج•دٹ·چs—ٌ‚ج‹tچs—ٌ‚ً‚©‚¯‚ؤ‚¢‚ـ‚·پB
‚O‚Vپ|‚O‚TپAژw’èژ²‚جIK‰ٌ“]
ƒ}ƒjƒsƒ…ƒŒپ[ƒ^‚جگشپA—خپAگآ‚ج•”•ھ‚ً‰Eƒhƒ‰ƒbƒO‚µ‚½ڈêچ‡‚ح
‚»‚ꂼ‚êƒ{پ[ƒ“چہ•WŒn‚جX,Y,Zژ²‚ً‰ٌ“]ژ²‚ئ‚·‚éIK‚ًچs‚¢‚ـ‚·پB
‚±‚جژw’èژ²‚جIK‰ٌ“]‚حCModel::IKRotateAxisDelta‚إچs‚¢‚ـ‚·پB
|
CCD•ûژ®‚ًڈ‚µ•دچX‚µ‚ؤ‚¢‚ـ‚·پB
–ع•Wچہ•W‚âƒ{پ[ƒ“‚جˆت’u‚ًپAگeƒ{پ[ƒ“‚ً’ت‚èژw’èژ²‚ً–@گü‚ئ‚·‚镽–تڈم‚ةژث‰e‚µ‚ؤ‚©‚ç
‚»‚ê‚ًگe‚جچہ•WŒn‚ة–ك‚µ‚ؤŒvژZ‚µ‚¢‚ـ‚·پB
‚±‚¤‚·‚邱‚ئ‚ة‚و‚è‰ٌ“]ژ²‚ھڈي‚ةژw’èژ²‚ة‚ب‚è‚ـ‚·پB
‚O‚Vپ|‚O‚UپAˆع“®‚جIK
ˆع“®‚جIK‚حCModel::IKMove‚ئIKMoveAxisDelta‚إچs‚¢‚ـ‚·پB
IKMoveAxisDelta‚à–ع•Wچہ•W‚ًŒˆ‚ك‚½Œم‚ةIKMove‚ًŒؤ‚رڈo‚·‚¾‚¯‚ب‚ج‚إ
IKMove‚¾‚¯‚ًگà–¾‚µ‚ـ‚·پB
|
‚±‚جŒvژZ‚حƒچپ[ƒJƒ‹چہ•W‚إچs‚¤‚½‚ك‚ـ‚¸–ع•Wˆت’u‚ةƒڈپ[ƒ‹ƒhچs—ٌ‚ج‹tچs—ٌ‚ً‚©‚¯‚ؤtarget‚ً‹پ‚ك‚ـ‚·پB
‚ ‚ئ‚حژہ‚ة—ح‹Z‚إ‚·‚—‚—پB
ƒ{پ[ƒ“‚جƒچپ[ƒJƒ‹چہ•W‚ًorgپAƒ{پ[ƒ“‚جƒچپ[ƒJƒ‹ƒ{پ[ƒ“•دŒ`چs—ٌ‚ًraw1پA
IK‚ة‚و‚éˆت’uˆع“®چs—ٌ‚ًmvmپAگe‚جƒ{پ[ƒ“‚جچs—ٌ‚ًpar1پAƒچپ[ƒJƒ‹‚ج–ع•Wˆت’u‚ًtarget‚ئ‚·‚é‚ئ
ˆب‰؛‚جژ®‚ھگ¬‚è—§‚؟‚ـ‚·پB
org * raw1 * mvm * par1 = target
‚±‚جژ®‚ًٹeگ¬•ھ‚ة‚آ‚¢‚ؤ“WٹJ‚µ‚ؤکA—§•û’ِژ®‚ً‰ً‚«(ژ†‚ئ‚¦‚ٌ‚ز‚آ‚إ)پA“±‚¢‚½ژ®‚إˆع“®گ¬•ھ‚ً‹پ‚ك‚ـ‚·پB
‚±‚جˆع“®‚ًƒ{پ[ƒ“‚جژpگ¨‚ة‘«‚µ‚ؤڈo—ˆڈم‚ھ‚è‚إ‚·پB
ƒIپ[ƒvƒ“ƒ\پ[ƒX‚جƒgƒbƒv‚ة–ك‚é
ƒgƒbƒvƒyپ[ƒW‚ة–ك‚é